The Portfolio
A collection of project work that produced on my professional development journey.
Kidnapped Vehicle
An end-to-end localizer using 2D Monte Carlo Localization for sparse feature map according to LIDAR measurements.
Some of the highlights of the project:
- Implemented Particle Filter in C++
- Estimate position of a moving car based on LIDAR measurements
Here is a video demonstration.
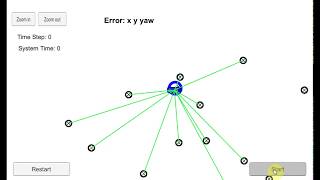
- blue car - ground truth data
- blue circle, with arrow point to the heading of the car - estimated location
- green line - laser range reading from the car
- blue line - laser range reading from the particle
As shown in the demo, the green laser sensors from the car nearly overlap the blue laser sensors from the particle, this means that the particle transition calculations were done correctly.
For details, please follow this link.